题目背景
本论文一抢渡长江为背景 需要完成在已知江宽 水流速度分布 选手游泳速度的前提下 建立模型计算出选手应采取的最佳游泳方向或路径
建模准备
建模前先推导了正弦定理和余弦定理
问题一

我对论文中的相关公式进行了推导
由论文中给出的参数得知
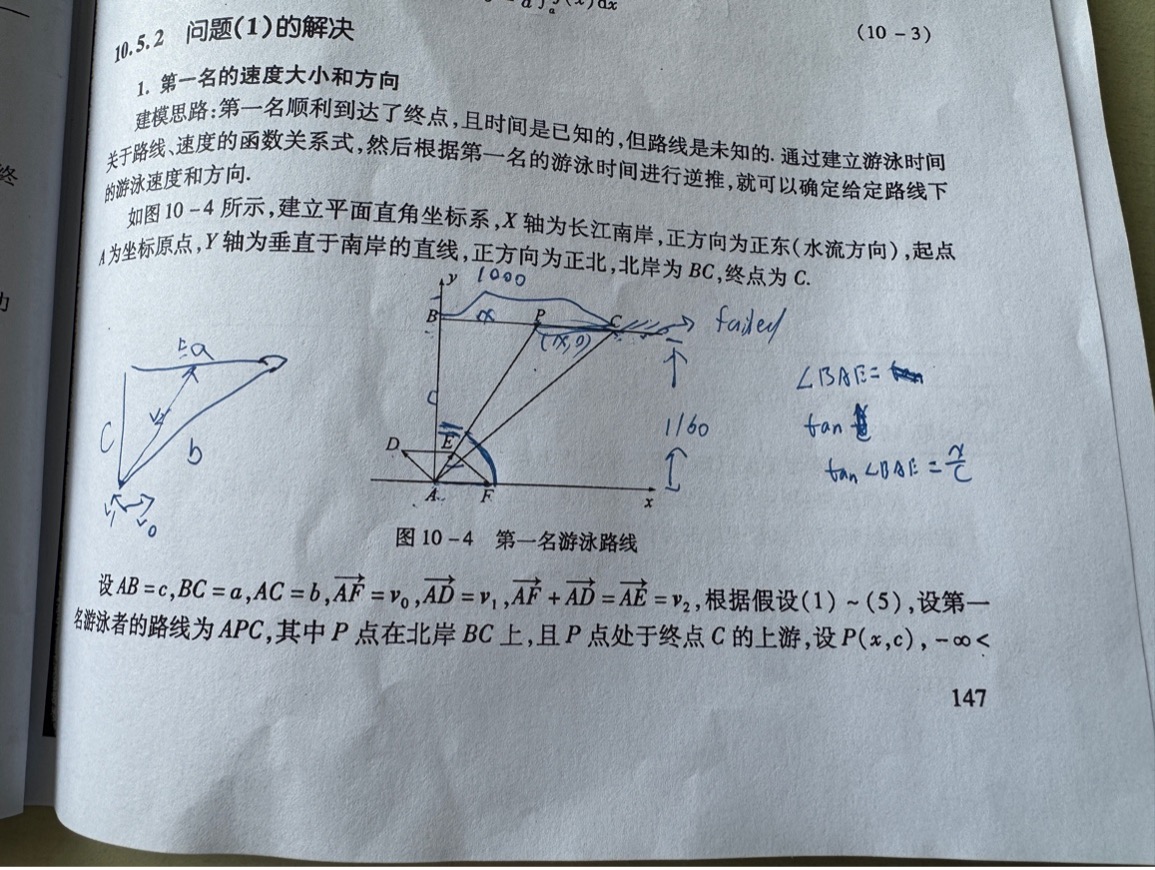
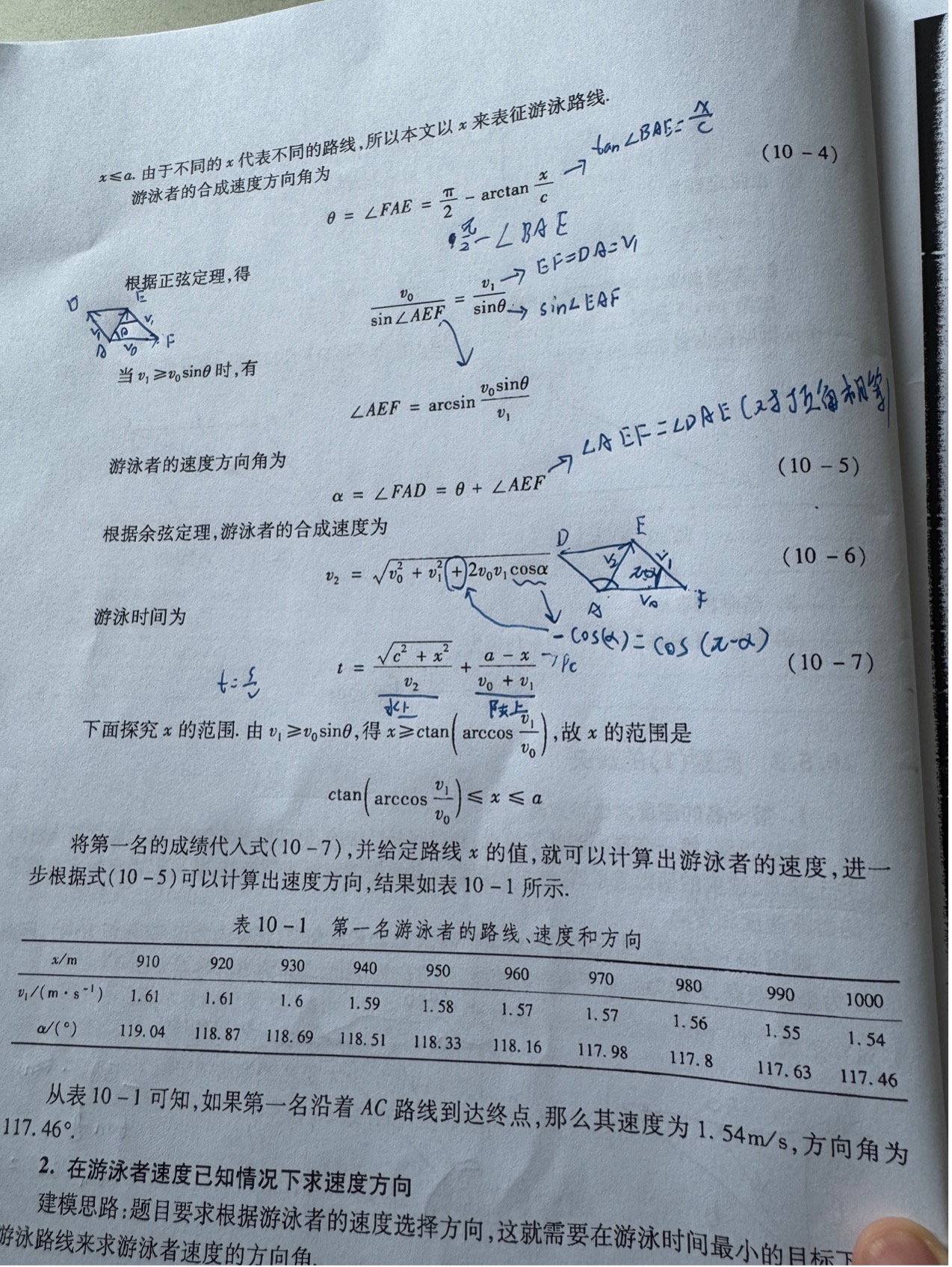
(10-4)
theta是游泳者的合成速度方向
论文中的
用到了正弦定理
在三角形AEF中
由于
EF = DA = v1
sin(theta) = sin(∠FAE)
因此推导出
经过变换得
(10-5)
游泳者的速度方向角
观察四边形ADEF
此处的合成速度v2(对应向量 AE)由两个分速度v0和v1通过矢量相加的方式合成 作为矢量 速度的合成遵循平行四边形法则 即以v0和v1为邻边构成的平行四边形 其对角线表示合速度v2的大小和方向
因此∠AEF = ∠EAD(对顶角相等)
得到
在三角形AEF中 根据余弦定理
又由于
(10-6)
因此
(10-7)
根据速度公式t = s/v
在论文中其将路程分为了AP PC两段 因此公式中前半部份是AP的时间 后半部份是PC的时间 由于在PC时v0 v1方向同向 因此是v0+v1
代码复现
通过一下代码求的相对应的结果
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
| import math
a = 1000
c = 1160
v0 = 1.89
v1 = 1.5
def calculate_theta(x, c):
"""
计算theta
"""
theta = math.pi / 2 - math.atan(x / c)
return theta
def calculate_AEF(theta, v0, v1):
"""
计算AEF
"""
AEF = math.asin(v0 * math.sin(theta) / v1)
return AEF
def calculate_alpha(theta, AEF):
"""
计算alpha
"""
alpha = theta + AEF
return alpha
def calculate_v2(v0, v1, alpha):
"""
计算v2
"""
cos_alpha = math.cos(alpha)
v2 = math.sqrt(v0**2 + v1**2 + 2 * v0 * v1 * cos_alpha)
return v2
|
通过一下代码可以得到当v1 = 1.5 1.89 2.11 v0 = 1.89时游泳时间与x的趋势
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| import math
import matplotlib.pyplot as plt
a = 1000
c = 1160
v0 = 1.89
v1 = 1.5
model = SwimModel(a=a, c=c, v0=v0, v1=v1)
x_values = list(range(900, 1001, 5))
t_values = []
for x in x_values:
result = model.forward(x)
t_values.append(result["time"])
plt.figure(figsize=(8, 5))
plt.plot(x_values, t_values, marker='o', linestyle='-', color='blue')
plt.title("t VS x")
plt.xlabel("x")
plt.ylabel("t")
plt.grid(True)
plt.legend()
plt.show()
|
通过以下代码可以解得在x = 1000时游泳者的速度 方向 时间
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
| import math
from scipy.optimize import fsolve
T_target = 910
x = 1000
c = 1160
v0 = 1.89
a = 1000
theta = math.atan(c / x)
def time_equation(v1):
ratio = (v0 * math.sin(theta)) / v1
if abs(ratio) > 1:
return 1e9
AEF = math.asin(ratio)
alpha = theta + AEF
v2 = math.sqrt(v0**2 + v1**2 + 2 * v0 * v1 * math.cos(alpha))
T_computed = math.sqrt(x**2 + c**2) / v2 + (a - x) / (v0 + v1)
return T_computed - T_target
v1_guess = 1.0
v1_solution = fsolve(time_equation, v1_guess)[0]
print(f"所需的游泳者速度 v1 ≈ {v1_solution:.4f} m/s")
|
所需的游泳者速度 v1 ≈ 1.5003 m/s
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
| import math
from scipy.optimize import fsolve
class SwimModel:
def __init__(self, a, c, v0, v1=None):
"""
a: 终点
c: 距离
v0: 水流速度
v1: 游泳速度
"""
self.a = a
self.c = c
self.v0 = v0
self.v1 = v1
def theta(self, x):
return math.pi / 2 - math.atan(x / self.c)
def AEF(self, theta, v1):
ratio = self.v0 * math.sin(theta) / v1
return math.asin(ratio)
def alpha(self, theta, AEF):
return theta + AEF
def v2(self, v1, alpha):
return math.sqrt(self.v0**2 + v1**2 + 2 * self.v0 * v1 * math.cos(alpha))
def total_time(self, v2, v1, x):
swim_time = math.sqrt(self.c**2 + x**2) / v2
flow_time = (self.a - x) / (self.v0 + v1)
return swim_time + flow_time
def forward(self, x):
"""前向:已知 x 和 v1,输出 α, v2, t"""
if self.v1 is None:
raise ValueError("请先设置 v1")
theta = self.theta(x)
AEF = self.AEF(theta, self.v1)
alpha = self.alpha(theta, AEF)
v2 = self.v2(self.v1, alpha)
t = self.total_time(v2, self.v1, x)
return {
"theta_rad": theta,
"alpha_rad": alpha,
"alpha_deg": math.degrees(alpha),
"v2": v2,
"time": t
}
def inverse_solve_v1(self, x, T_target):
"""已知 T_target 和 x,求 v1"""
def equation(v1):
theta = self.theta(x)
AEF = self.AEF(theta, v1)
alpha = self.alpha(theta, AEF)
v2 = self.v2(v1, alpha)
t = self.total_time(v2, v1, x)
return t - T_target
result = fsolve(equation, 1.0)[0]
return result
model = SwimModel(a=1000, c=1160, v0=1.89, v1=1.50)
result = model.forward(x=1000)
print(f"α: {result['alpha_deg']:.2f}")
print(f"v2: {result['v2']:.4f}")
print(f"t: {result['time']:.2f}")
|
α: 121.85
v2: 1.6822
t: 910.46
选手成功到达终点的概率
论文中定义概率
其意思是 在游泳速度为v1时成功的概率/在游泳速度最大时成功的概率
检测在2002年时的最低游泳成功的速度
代码复现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| import numpy as np
u = 1.89
X = 1000.0
Y = 1160.0
def v_min(u, X, Y):
return np.sqrt(u**2 + (X/Y)**2)
v_thresh = v_min(u, X, Y)
print("2002 阈值速度 v_min =", v_thresh, "m/s")
vs = np.linspace(0.5, 4.0, 36)
results = ["可成功" if v>=v_thresh else "失败" for v in vs]
for v, res in zip(vs, results):
print(f"速度 {v:.2f} m/s: {res}")
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| def v_min(u, Y, X):
return u * Y / X
u_2002 = 1.3
Y_2002 = 1160
X_2002 = 1000
v_threshold_1934 = v_min(u_2002, Y_2002, X_2002)
print(f"2002 年成功游过江所需最低速度为:{v_threshold_1934:} m/s")
def v_min(u, Y, X):
return u * Y / X
u_1934 = 1.2
Y_1934 = 1400
X_1934 = 3800
v_threshold_1934 = v_min(u_1934, Y_1934, X_1934)
print(f"1934 年成功游过江所需最低速度为:{v_threshold_1934:} m/s")
|
2002 年成功游过江所需最低速度为:1.508 m/s
1934 年成功游过江所需最低速度为:0.4421052631578947 m/s
1
2
3
4
5
6
7
8
9
| def d(v1, a, c):
v0 = 1.89
upper = a - c * math.tan(math.acos(v1 / v0))
d = upper / a
return d
p_2002 = d(1.5, 1000, 1160) / d(1.7, 1000, 1160)
print(f"2002 年成功游过江的概率 p_2002 = {p_2002}")
p_1934 = d(1.5, 3800, 1400) / d(1.7, 3800, 1400)
print(f"1934 年成功游过江的概率 p_1934 = {p_1934}")
|
2002 年成功游过江的概率 p_2002 = 0.2538695839819621
1934 年成功游过江的概率 p_1934 = 0.8740249877014562
问题三
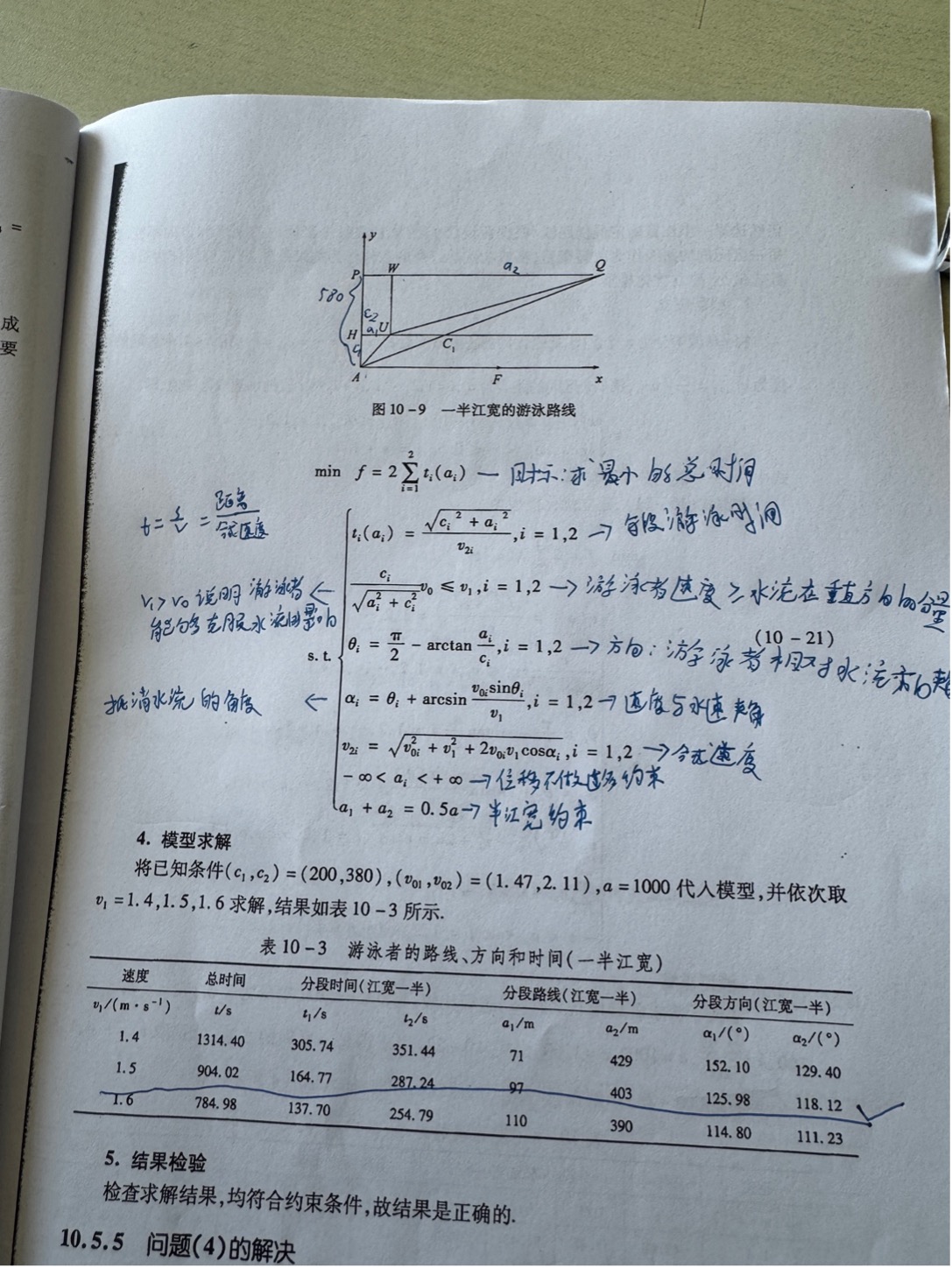
目标函数
求最优的成绩 因此目标函数就是最小时间(最小半江宽时间*2)
约束
第1个约束
每段的游泳时间
第2个约束
游泳者的速度 >= 水流在垂直方向的分量
v1 > v0说明游泳者能能克服水流的影响
第3个约束
游泳者相对水流方向的夹角
第4个约束
速度与水速的夹角即抵消水流的角度
第5个约束
每一段的合成速度约束
第6个约束
自由变量
第7个约束
半江宽约束
代码复现
通过代码复现得
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
| import numpy as np
from scipy.optimize import minimize
c1, c2 = 200, 380
v01, v02 = 1.47, 2.11
v1 = 1.5
a_total = 500
def objective(a):
a1, a2 = a
t1 = time_segment(a1, c1, v01)
t2 = time_segment(a2, c2, v02)
return 2 * (t1 + t2)
def time_segment(ai, ci, v0i):
theta = np.pi / 2 - np.arctan(ai / ci)
alpha = theta + np.arcsin((v0i * np.sin(theta)) / v1)
v2i = np.sqrt(v0i**2 + v1**2 + 2 * v0i * v1 * np.cos(alpha))
s = np.sqrt(ai**2 + ci**2)
return s / v2i
def eq_constraint(a):
return a[0] + a[1] - a_total
def ineq_constraint1(a):
a1 = a[0]
return v1 - v01 * c1 / np.sqrt(a1**2 + c1**2)
def ineq_constraint2(a):
a2 = a[1]
return v1 - v02 * c2 / np.sqrt(a2**2 + c2**2)
def compute_alpha(ai, ci, v0i):
theta = np.pi / 2 - np.arctan(ai / ci)
alpha = theta + np.arcsin((v0i * np.sin(theta)) / v1)
return np.degrees(alpha)
a_init = [100, 400]
bounds = [(10, 490), (10, 490)]
constraints = [
{'type': 'eq', 'fun': eq_constraint},
{'type': 'ineq', 'fun': ineq_constraint1},
{'type': 'ineq', 'fun': ineq_constraint2},
]
res = minimize(objective, a_init, bounds=bounds, constraints=constraints, method='SLSQP')
if res.success:
a1, a2 = res.x
print(f"最优解:a1 = {a1:.2f}, a2 = {a2:.2f}, a1 + a2 = {a1 + a2:.2f}")
print(f"总时间 = {res.fun:.2f} 秒")
print(f"α1 = {compute_alpha(a1, c1, v01):.2f}°, α2 = {compute_alpha(a2, c2, v02):.2f}°")
else:
print("优化失败:", res.message)
|
最优解:a1 = 96.84, a2 = 403.16, a1 + a2 = 500.00
总时间 = 904.02 秒
α1 = 126.06°, α2 = 118.06°
问题四
问题四的公式和问题三的类似 主要的不同点是问题三的速度v0i是两个离散的数值 问题四的v0i是连续数值离散化 可以有n个
论文中给出的v0i的公式
其中k为水速斜率 其公式为
意思是水速在∆y内变化了∆v
论文中由于水速是分段给出的连续分布 因此水速的变化是线性的 因此其水速斜率是一个常数
水速在200米内变化了2.28 (岸边速度为0 ~水速最大为2.28)
因此
代码复现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
| def time_segment(a_i, c1i, v0i, debug=False):
theta_i = np.pi / 2 - np.arctan(a_i / c1i)
sin_theta = v0i * np.sin(theta_i) / v1
if np.abs(sin_theta) > 1:
if debug:
print(f"[警告] sin_theta={sin_theta:.4f} 超出 [-1, 1]")
sin_theta = np.clip(sin_theta, -1, 1)
alpha_i = theta_i + np.arcsin(sin_theta)
v2i = np.sqrt(v0i**2 + v1**2 + 2 * v0i * v1 * np.cos(alpha_i))
s = np.sqrt(a_i**2 + c1i**2)
time = s / v2i
if debug:
print(f"a = {a_i:.2f}, c1 = {c1i}, v0 = {v0i:.3f}")
print(f"θ = {np.degrees(theta_i):.2f}°, α = {np.degrees(alpha_i):.2f}°, v2 = {v2i:.3f}, s = {s:.2f}, time = {time:.2f}\n")
return time
a_list = [-30, 80, 420]
c1_list = [100, 100, 380]
v0i_list = [0.57, 1.71, 2.28]
v1 = 1.5
total_time = 0
for i in range(3):
t = time_segment(a_list[i], c1_list[i], v0i_list[i])
print(f"t{i+1}: {t:.2f} s")
total_time += t
print(f"总时间:{2 * total_time:} 秒")
|
t1: 84.65 s
t2: 73.11 s
t3: 334.95 s
总时间:985.430963388645 秒
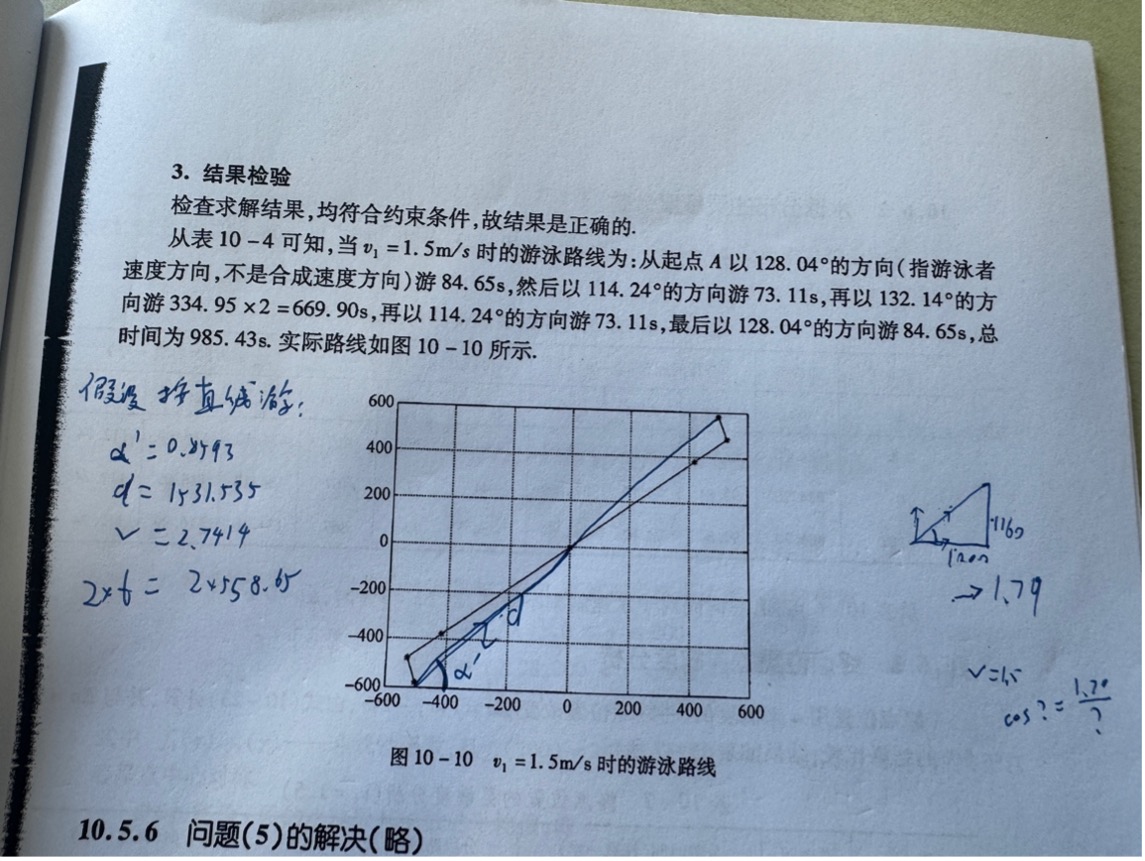
可以在论文中看到其路径是先往上游游在往下游游
这有点不符合直觉
我们假设若按照直线游
通过代码可以得到
1
2
3
4
5
6
7
8
9
| alpha = np.arctan(1160 / 1000)
d = 1160/ np.sin(alpha)
v = 1.79/np.cos(alpha)
t = d/v
2 * t
|
1117.31843575419
这不是最短的时间 因此该路径看似不符合直觉但是确实是最短的时间
灵敏度分析
调整上述代码中的参数
将v1速度改为1.515和1.48
t1: 83.56 s
t2: 71.79 s
t3: 334.99 s
总时间:980.6787856865337 秒
t1: 85.77 s
t2: 74.54 s
t3: 334.89 s
总时间:990.4005321378754 秒
T对v1敏感
将k的值改为0.011和0.0118
t1: 84.65 s
t2: 73.11 s
t3: 334.95 s
总时间:985.430963388645 秒
t对k不敏感
模型拓展
由于问题四中的模型的速度建模思路为:将连续分布所在的江宽等分为若干区间 使得水速在每个区间近似为常数
因此在问题四中k是常数 水速是线性的
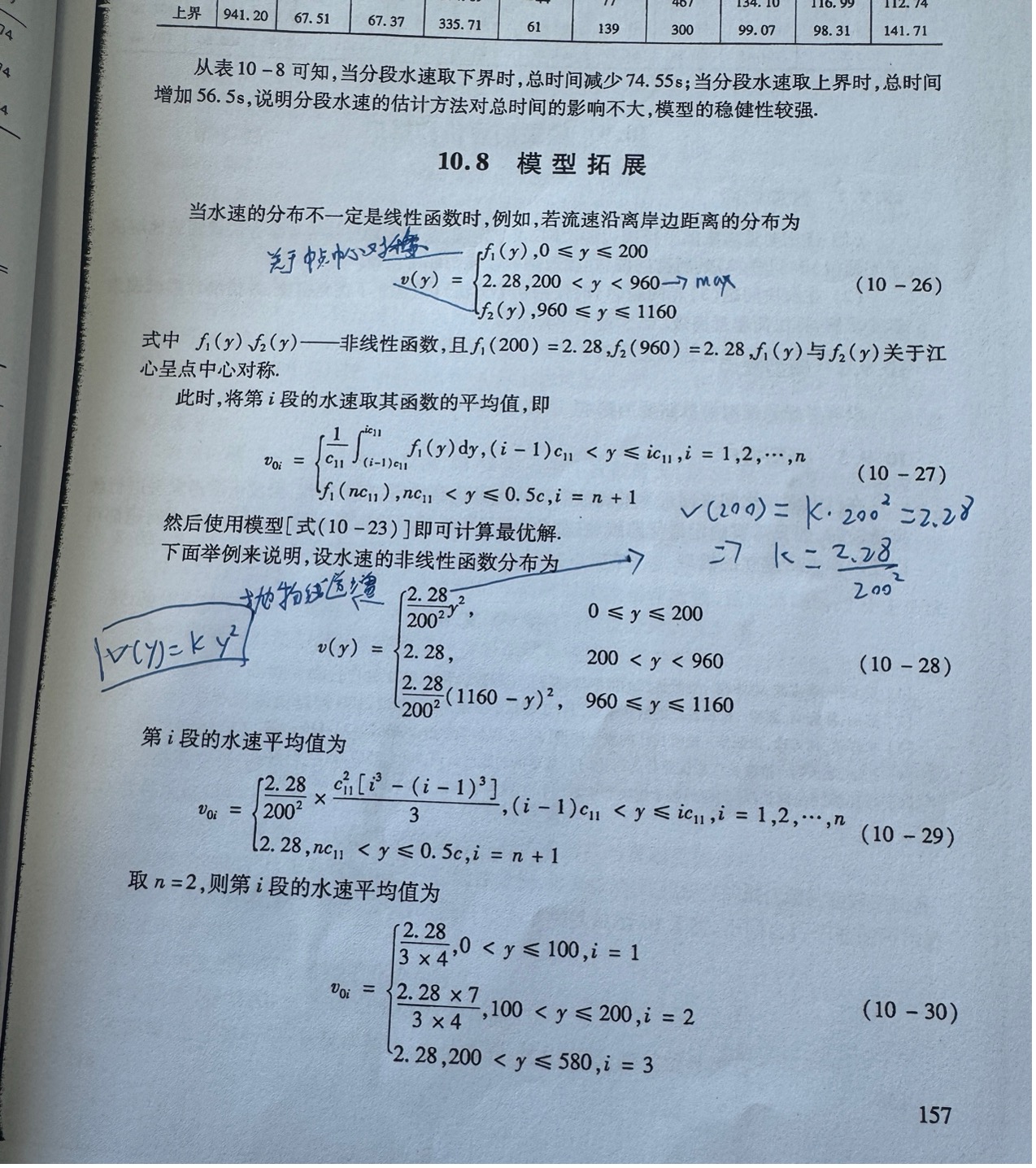
当水速不是线性的时候
其定义了v关于y的公式
在[0,200]区间中水流满足
v(0) = 0
v(200) = 2.28
为了满足此条件 其选择了一个开口向上的抛物线形式
解得 k = 2.28/200^2
由于f1(y)和f2(y)关于江心中心对称
在[960,1160]区间同理
选择抛物线函数的原因(论文中未提及 可以添加)
物理现象水流速度分布 在自然河流中 靠近岸边的地方水流较慢 越靠近江心水流越快 江心处水流速度达到最大值
这种分布不是连续且平滑变化的 抛物线是一种最简单的非线性函数 能够很好地模拟这种先慢后快再慢的对称分布趋势